An important class of potential based two-dimensional motion are those that are integrable. For these systems there exists a second conserved quantity, a constant of the motion, constraining the trajectory to a two dimensional manifold in the four dimensional phase space. Two familiar kinds of such integrable systems are those based on the separable and central potentials.
In the separable potential case the potential is the sum of two
independent functions of ![]() and
and ![]() respectively,
respectively,
![]() . This leads to two conserved quantities,
. This leads to two conserved quantities,
![]() and
and ![]() ,
the energies in
,
the energies in ![]() and
and ![]() motions respectively.
The trajectories in
motions respectively.
The trajectories in ![]() and
and ![]() decouple from each other, each
behaving as one-dimensional motion. Each of these motions
trace concentric ellipses, or concentric
deformed contours, in the
decouple from each other, each
behaving as one-dimensional motion. Each of these motions
trace concentric ellipses, or concentric
deformed contours, in the ![]() and
and ![]() independent two-dimensional phase spaces.
independent two-dimensional phase spaces.

The solutions of these problems can be derived analytically by combining two one-dimensional solutions obtained by techniques from classical mechanics.
The total energy ![]() is a constant.
Assume that
is a constant.
Assume that ![]() have a minimum (zero value) at particular
values of
have a minimum (zero value) at particular
values of ![]() and
and ![]() respectively. Fig. 2.1 shows
schematically trajectories (labeled A to E) with energies
from 0 to
respectively. Fig. 2.1 shows
schematically trajectories (labeled A to E) with energies
from 0 to ![]() . Therefore
the trajectories in the
. Therefore
the trajectories in the ![]() and
and ![]() subspaces
combine to describe the trajectories of the particle in
4-dimensional phase space.
subspaces
combine to describe the trajectories of the particle in
4-dimensional phase space.
From another point of view, the concentric closed contours in Fig. 2.1 result from the intersections of the full trajectories with the appropriate plane. They are called Surfaces of Section (SOS). The concentric closed contours are the hallmark of integrability.
The central potential case
Although the dynamics of integrable systems are simple,
it is often not easy to make this simplicity apparent.
The trajectories remain in four-dimensional phase space
despite being restricted to two-dimensional manifolds.
We can deduce hints about the topology of the latter
by considering a central potential.
The total energy of such a system can be written as
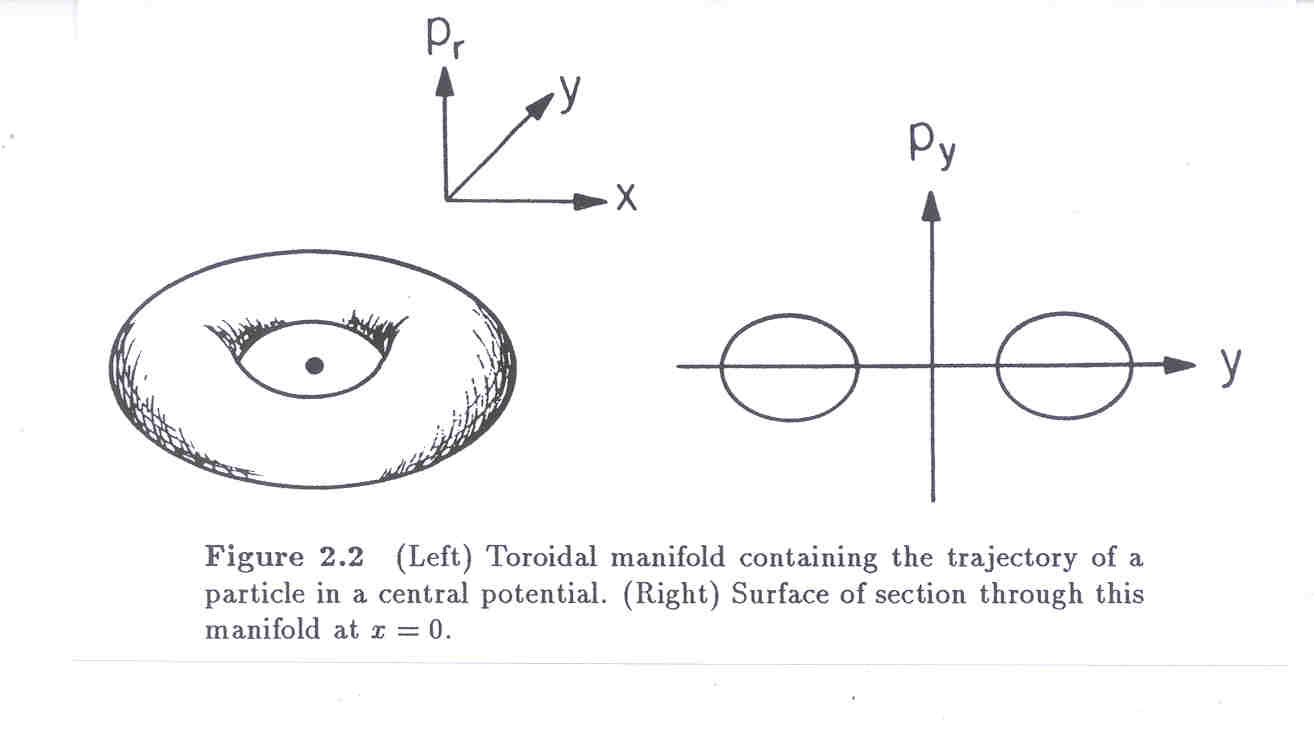
A ![]() SOS, built by recording
SOS, built by recording
![]() and
and ![]() each time that
each time that ![]() along the trajectory, should show
closed contours. Recall that
along the trajectory, should show
closed contours. Recall that ![]() is
is ![]() on this SOS.
Changing
on this SOS.
Changing ![]() or
or ![]() will change
the dimension of the torus and therefore will also change
the contours in the SOS.
will change
the dimension of the torus and therefore will also change
the contours in the SOS.
The toroidal topology of the phase space of a central potential can be shown to characterize all integrable systems. The manifold on which lies a trajectory with given constants of the motion is called an Invariant Torus. There are many of these for a given energy. The SOS might schematically look like the following:

There are fixed points associated with trajectories that repeat exactly after some period. The elliptic fixed points organize stable trajectories under perturbations. Around each of these there is a family of concentric tori, bounded by a separatrix. The hyperbolic fixed points occur at the intersections of separatrices. They are stable under perturbation along one of the axis of the hyperbola, but unstable along the other.